servlet
区块链
QLC
均值算法
intersect
桥接模式
微软技术
损失函数
产品
堆排序
EEG
Linux运维脚本
数字IC
个人开发
javaee
坑人
3D建模
强化学习
text
web防火墙
并联机器人
2024/4/11 21:42:55
【现代机器人学】学习笔记六:闭链运动学
这一章的内容主要讲并联机器人的相关算法,内容在全书中属于比较少,仅仅介绍概念的章节。
恰好部门中有一位同事就是专门做并联机器人出身的博士,也请他帮忙看了一下内容,但他觉得写书的这个人可能也不是非常懂并联机器人…
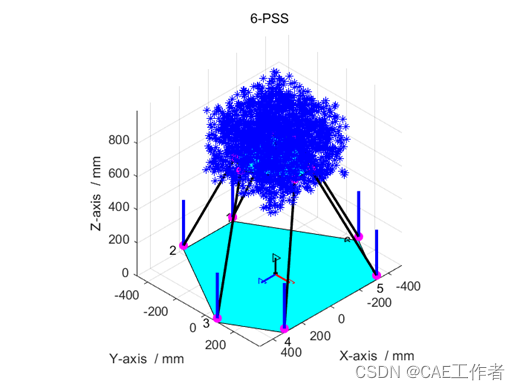
article-6-pss 并联六自由度机构轨迹规划
建模
** [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-djltxj90-1687070335773)(data:image/svgxml;utf8, )]
**
程序如下: % clc % clear all % function []PSS1(XP,YP,ZP) tic %%%%%鍒濆浣嶇疆鐨勪綅濮?%%%%% % XP 0; %鍔ㄥ钩鍙…